Alle Beispiele wurden mit der Ardublock-Datei von letsgoING erstellt. Die Zeichnungen der Schaltungen wurden mit fritzing realisiert.
Die Ardublock-Scripte bitte mit Rechtsklick und “Link speichern unter…” herunterladen.
Inhalt
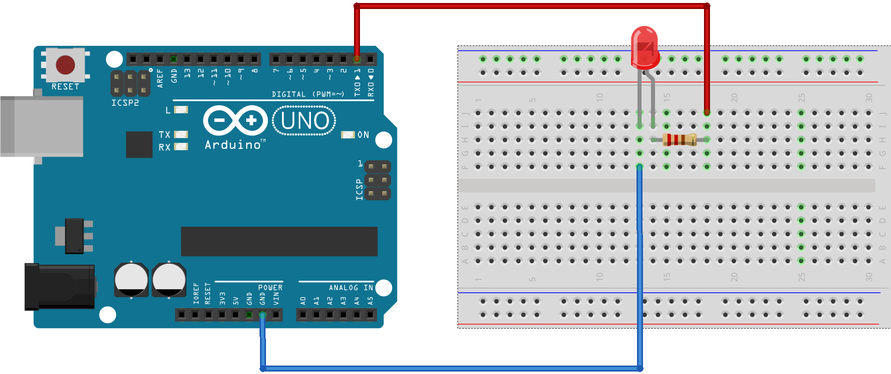
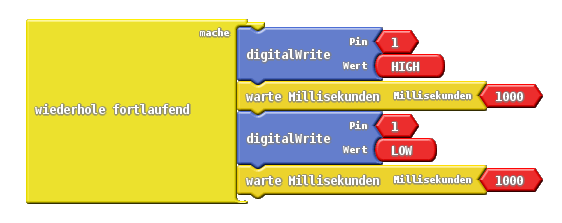
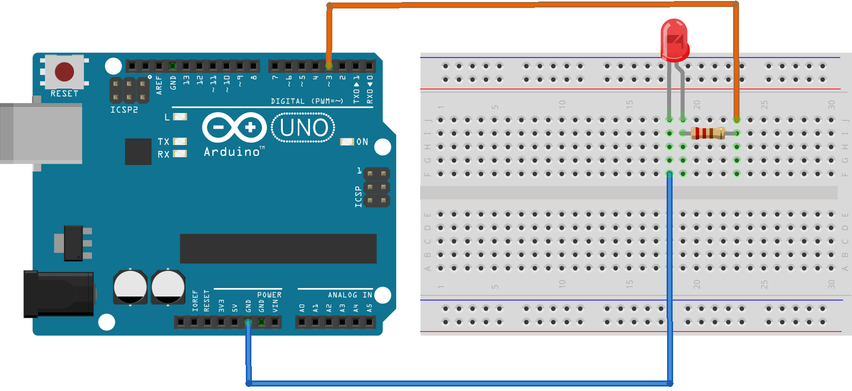
LED
Die LED an „Digital 1“ blinkt im Sekundentakt
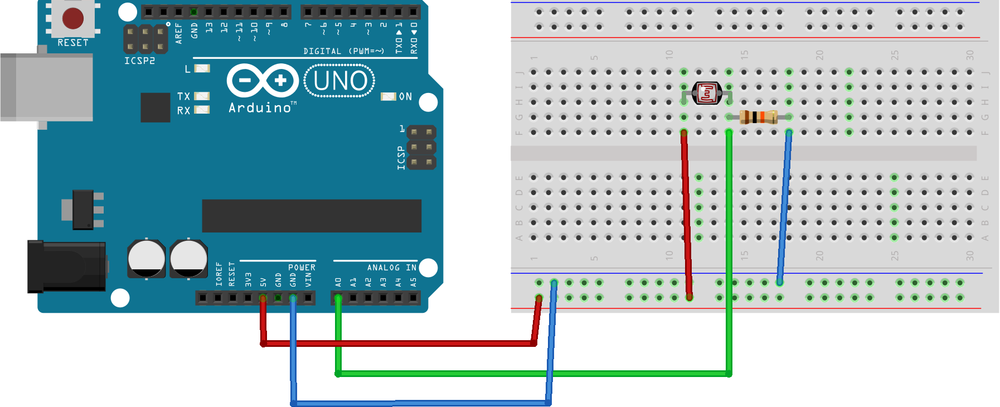
LDR
Der Wert des lichtempfindlichen Widerstands wird im Serial Monitor angezeigt. Der Serial Monitor ist ein Fenster, das Werte des Arduino anzeigen kann (Start: rechts oben Serieller Monitor oder Strg-M).

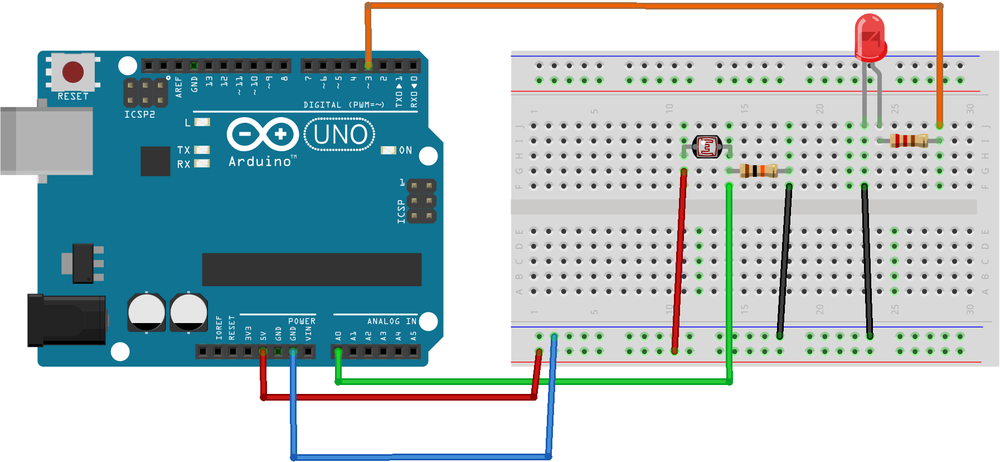
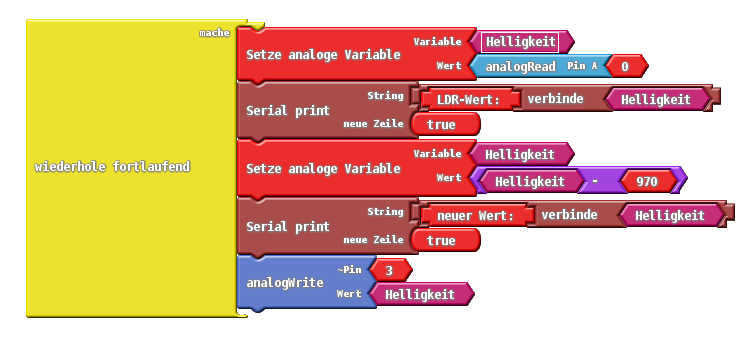
LED mit LDR dimmen
Der Wert des LDR wird in der Variable “Helligkeit” gespeichert, umgerechnet und dann an die LED gesendet. Der Wert “970” hängt vom Widerstand ab und muss mittels der Werte im Serialmonitor angepasst werden.
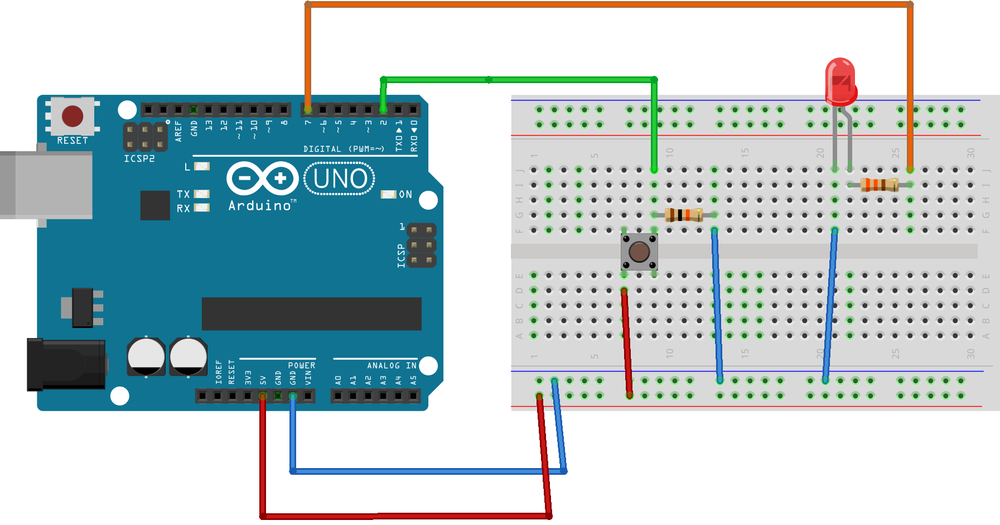
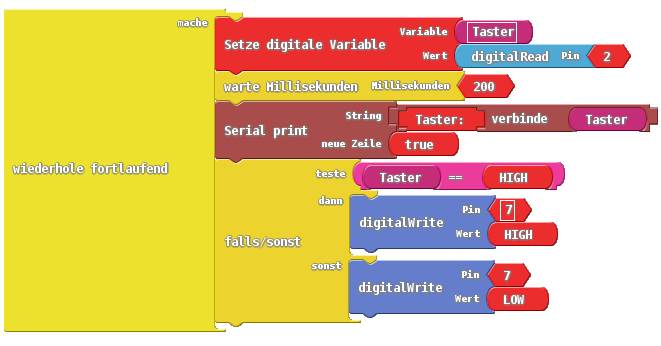
Taster
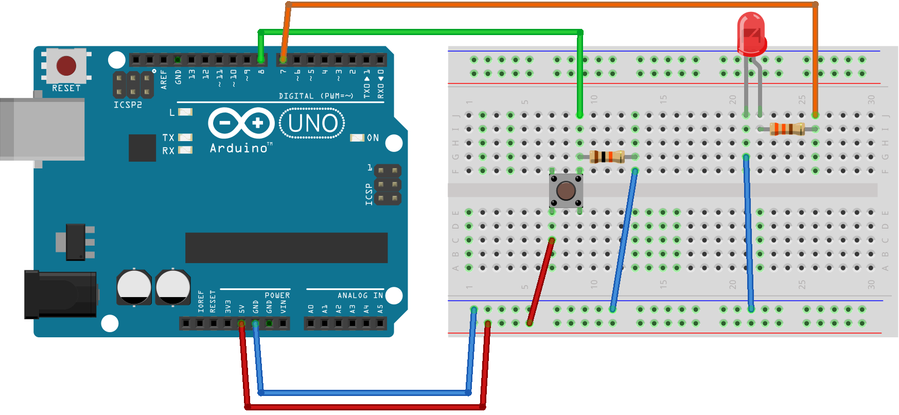
Der Wert eines Tasters wird ausgelesen und damit eine LED geschaltet. Ist der Taster gedrückt, leuchtet die LED.
Der Widerstand (möglichst groß - z.B. 10kΩ) verhindert bei gedrücktem Taster einen Kurzschluss. Dieser Widerstand wird Pull-Down-Widerstand genannt.
Die Verzögerung (200ms) “entprellt” den Taster.
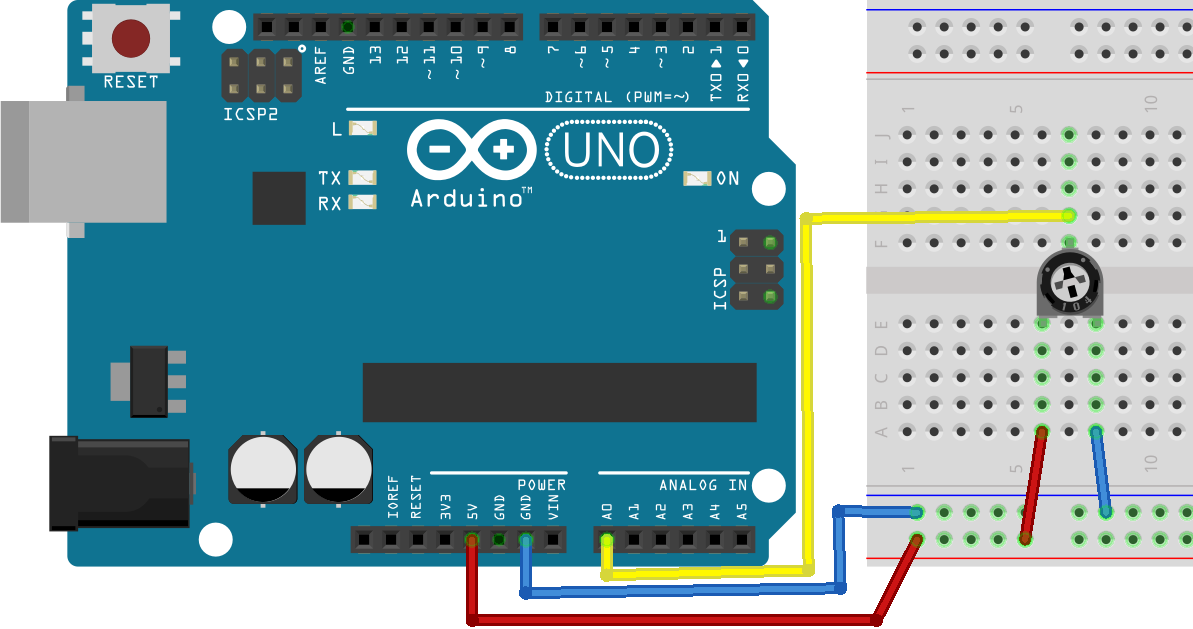
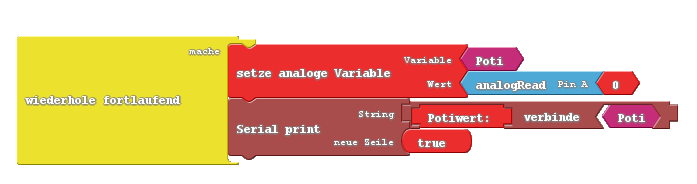
Poti
Ein Poti liefert Werte zwischen 0 und 1023. Hier wird der Wert ausgelesen, in einer Variable gespeichert und über den Serial Monitor angezeigt.
Variablen
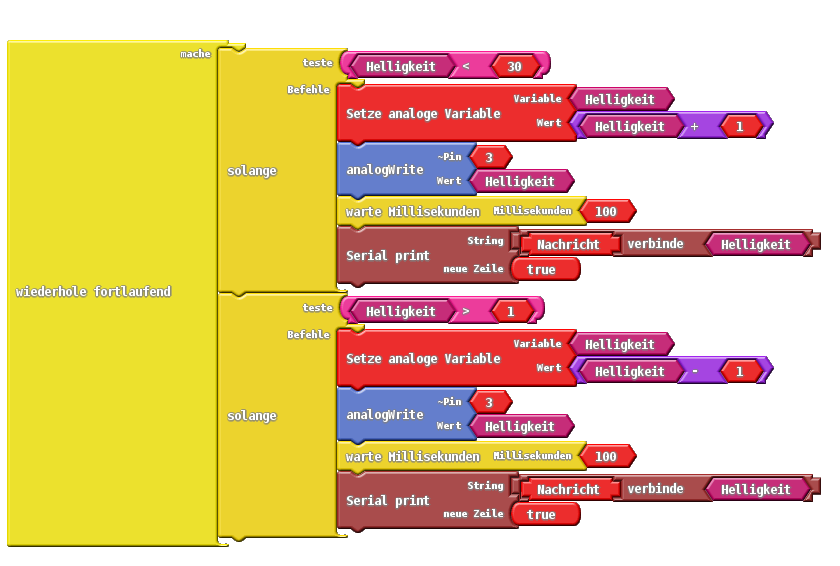
Eine LED wird gedimmt. Dazu zählt die Variable “Helligkeit” von 1 bis 30 und zurück. Die Steuerung der Helligkeit geht nur an Pins, die PWM können, also mit “~” gekennzeichnet sind.
Taster als Impulsgeber
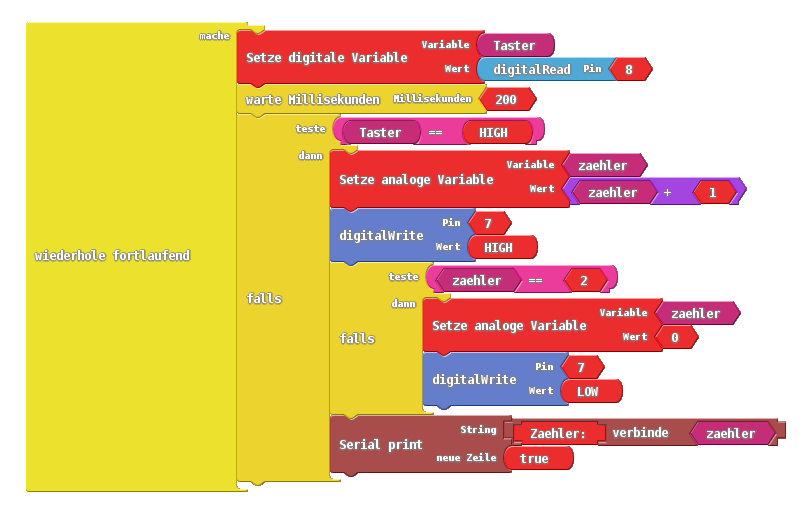
Ein Druck auf den Taster lässt die LED leuchten, ein weiterer Druck schaltet die LED wieder aus.
Ultraschallsensor
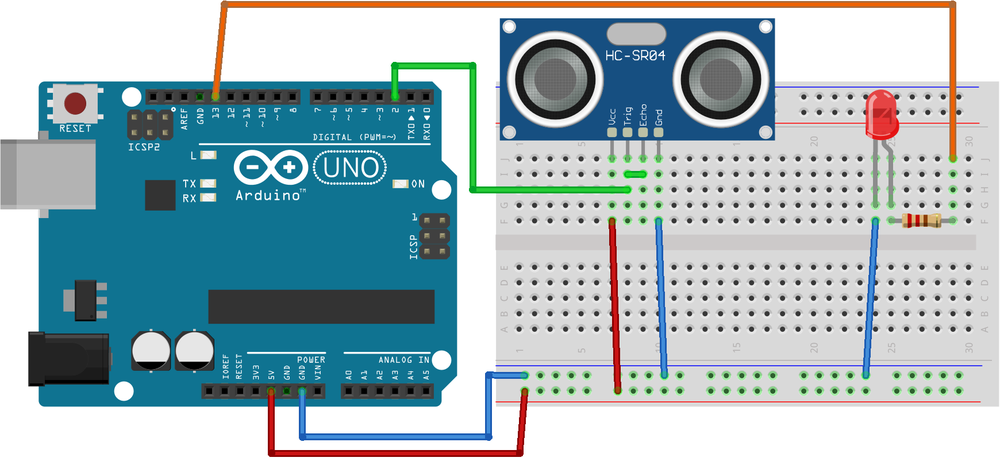
Die Werte des Ultraschallsensors (Abstand in cm) werden im Serial Monitor angezeigt. Wenn die Entfernung weniger als 10 cm ist, dann geht die LED an.

Relais
Das Relais schaltet den, von einem eigenen Stromkreis betriebenen, Motor im Sekundentakt aus und an.


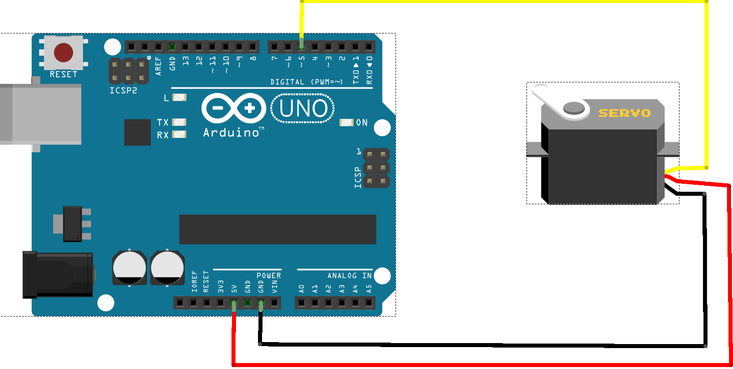
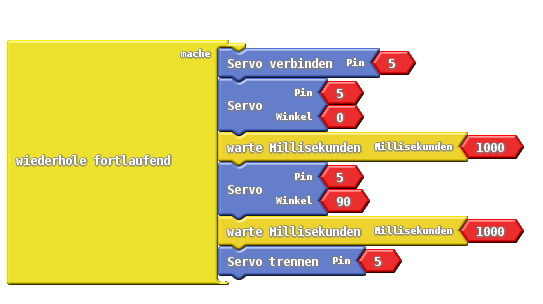
Servo-Motor
Ein Servo-Motor kann feste Werte (in Grad) einnehmen.
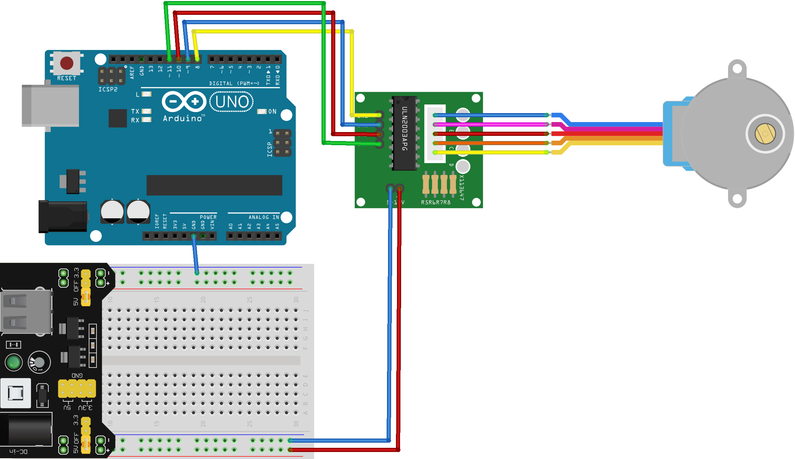
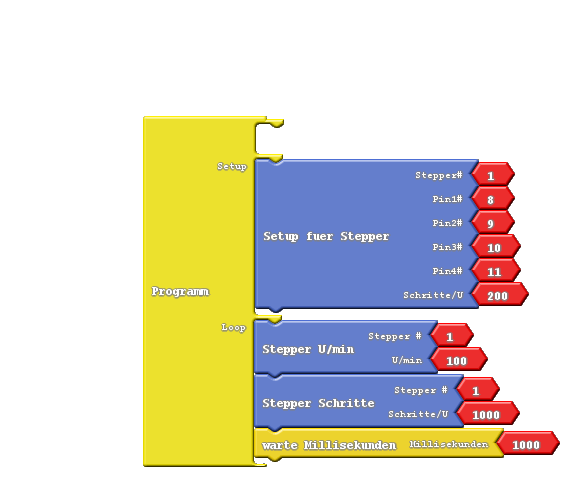
Schrittmotor
Motor
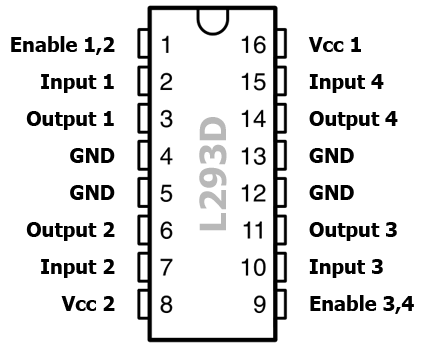
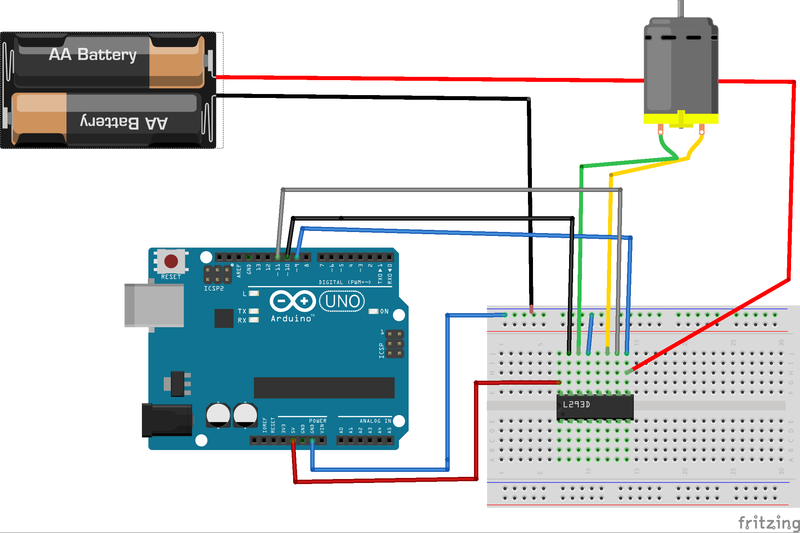
Ein Gleichstrommotor benötigt eine externe Stromversorgung. Die Ansteuerung erfolgt über eine H-Brücke (L293D). Diese hält einen kurzzeitigen Strom von 1,2 A und einen dauerhaften Storm von 600 mA pro Kanal aus. Die integrierten Dioden fangen die Induktionsströme ab, die beim Nachdrehen des Motors entstehen.
Das Programm lässt den Motor 5 Sekunden in der einen Richtung, dann 5 Sekunden in der anderen Richtung drehen. Über die Werte High/LOW wird die Richtung definiert.

Zufallszahl
Das Programm erzeugt Zufallszahlen zwischen 0 und 5. Diese werden über den Serial Monitor ausgegeben.
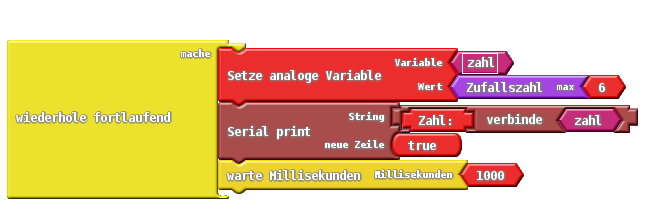
Die “Zufallszahlen” sind nicht wirklich zufällig. Sie kommen ab Start immer in der gleichen Reihenfolge. Will man echte Zufallszahlen, muss man die Erzeugung der Zufallszahlen am Anfang über einen echten Zufallswert verzögern.
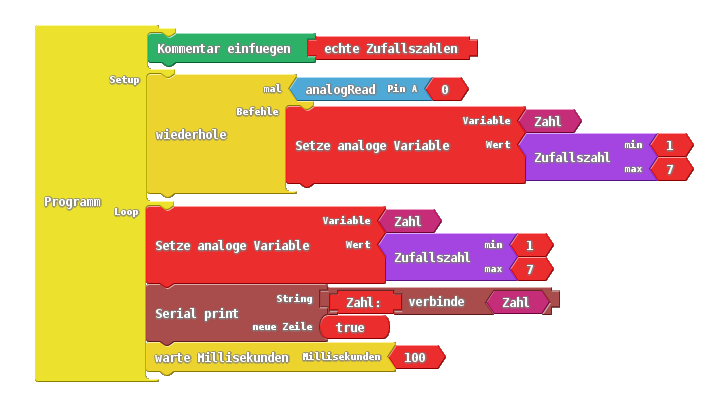
Echte Zufallszahlen
Einen echten Zufallswert liefert der analoge Eingang, wenn nichts angeschlossen ist. Also lässt man das Programm am Anfang so oft Zufallszahlen erzegen, wie der Wert vom analogen Eingang ist. Danach startet das Programm mit Zufallszahlen.
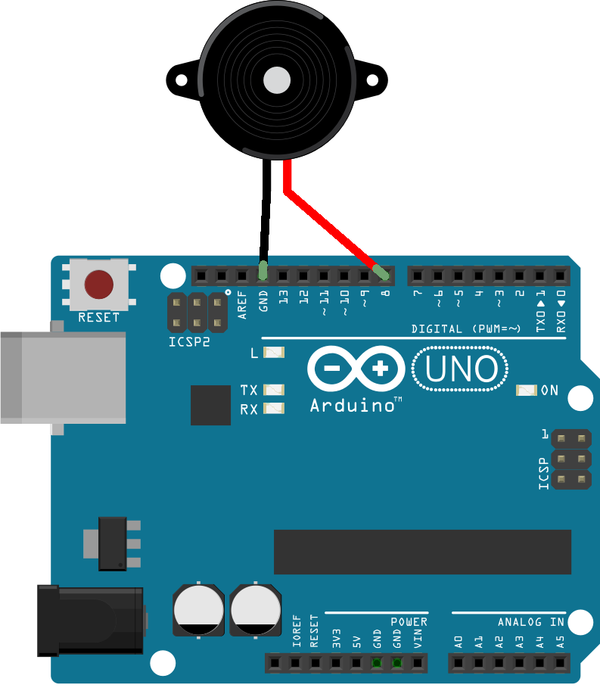
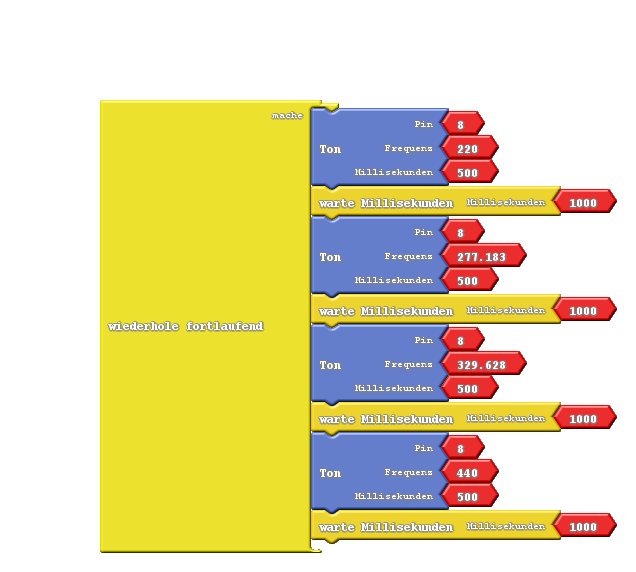
Töne
Das Programm spielt die Töne A, Cis, E, A nacheinander.